- 您现在的位置:买卖IC网 > Sheet目录478 > MMA6527KW (Freescale Semiconductor)IC ACCELEROMETER XY AXIS 16QFN
�� �
�
�4.5.2�
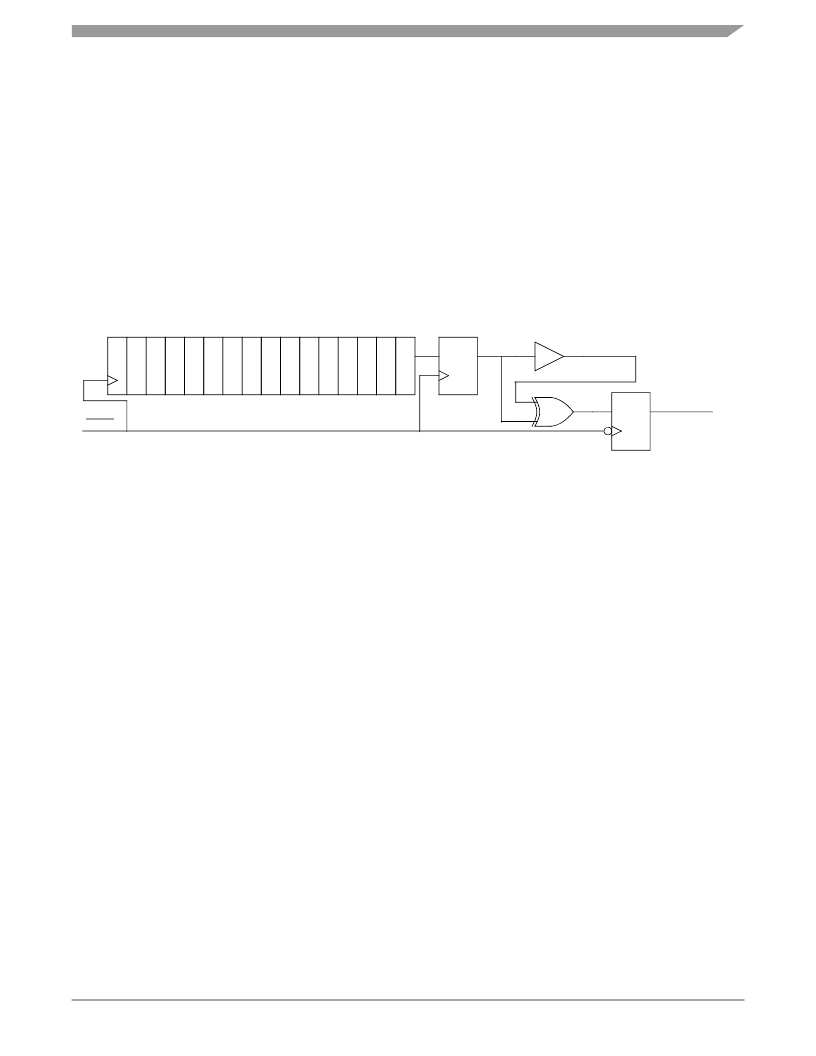
�SPI� Data� Output� Verification� Error�
�The� device� includes� a� function� to� verify� the� integrity� of� the� data� output� to� the� MISO� pin.� The� function� reads� the� data� transmitted�
�on� the� MISO� pin� and� compares� it� against� the� data� intended� to� be� transmitted.� If� any� one� bit� doesn’t� match,� a� SPI� MISO� Mismatch�
�Fault� is� detected� and� the� MISOERR� flag� in� the� DEVSTAT� register� is� set.�
�If� a� valid� SPI� acceleration� request� message� is� received� during� the� SPI� transfer� with� the� MISO� mismatch� failure,� the� SPI� accel-�
�eration� request� message� is� ignored� and� the� device� responds� with� a� “MISO� Error”� response� during� the� subsequent� SPI� message�
�(reference� Table� 30� ).� The� Arming� function� is� not� updated� if� a� MISO� mismatch� failure� occurs.� The� PCM� function� is� not� affected� by�
�the� MISO� mismatch� failure.�
�If� a� valid� SPI� register� write� request� message� is� received� during� the� SPI� transfer� with� the� MISO� mismatch� failure,� the� register�
�write� is� completed� as� requested,� but� the� device� responds� with� a� “MISO� Error”� response� as� shown� in� Table� 30� ,� during� the� subse-�
�quent� SPI� message.�
�If� a� valid� SPI� register� read� request� message� is� received� during� the� SPI� transfer� with� the� MISO� mismatch� failure,� the� register�
�read� is� ignored� and� the� device� responds� with� a� “MISO� Error”� response� as� shown� in� Table� 30� ,� during� the� subsequent� SPI� mes-�
�sage.� If� the� register� read� request� is� for� the� DEVSTAT� register,� the� DEVSTAT� register� will� not� be� cleared.�
�In� all� cases,� the� MISOERR� flag� in� the� DEVSTAT� register� will� remain� set� until� a� successful� SPI� Register� Read� Request� of� the�
�DEVSTAT� register� is� completed.�
�SPI� DATA� OUT� SHIFT� REGISTER�
�DATA� OUT� BUFFER�
�D�
�Q�
�D�
�Q�
�MISO�
�R�
�SCLK�
�4.5.3�
�Invalid� Requests�
�Figure� 37.� SPI� Data� Output� Verification�
�D�
�R�
�Q�
�MISO� ERR�
�4.5.3.1� Acceleration� Data� Request� Mismatch� Failure�
�The� device� detects� an� “Acceleration� Data� Request� Mismatch”� error� if� the� SPI� “Acceleration� Data� Request”� Command� data�
�listed� in� Table� 32� does� not� match� the� internal� register� settings.� The� device� responds� to� an� “Acceleration� Data� Request� Mismatch”�
�error� with� an� “Invalid� Accel� Request”� response� as� specified� in� Table� 30� on� the� subsequent� SPI� message� only.� No� internal� fault� is�
�recorded.� The� arming� function� will� not� be� updated� if� an� “Acceleration� Data� Request� Mismatch”� Error� is� detected.� The� PCM� output�
�is� not� affected� by� the� “Acceleration� Data� Request� Mismatch”� error.�
�Register� operations� will� be� executed� as� specified� in� Section� 4.4� .�
�4.5.3.2� Invalid� Register� Request�
�The� following� conditions� result� in� an� “Invalid� Register� Request”� error:�
�?� An� attempt� is� made� to� write� to� an� un-writable� register� (Writable� registers� are� defined� in� Section� 3.1� ,� Table� 3� ).� Attempts� to�
�write� to� registers� $09,� $18,� $19,� $1A� and� $1B� will� result� in� an� error.�
�?� An� attempt� is� made� to� write� to� a� register� while� the� ENDINIT� bit� in� the� DEVCFG� register� is� set�
�–� This� applies� to� all� registers� with� the� exception� of� the� DEVCTL� register� (Only� Bits� 6� and� 7� can� be� modified)�
�?�
�An� attempt� is� made� to� read� an� un-readable� register� (Readable� registers� are� defined� in� Section� 3.1� ,� Table� 3� ).� Attempts� to�
�read� registers� $09,� $18,� $19,� $1A� and� $1B� will� result� in� an� error.�
�The� device� responds� to� an� Invalid� Register� Request”� error� with� an� “Invalid� Register� Request”� response� as� shown� in� Table� 30� .�
�4.5.4�
�Device� Reset� Indications�
�If� the� DEVINIT,� or� DEVRES� bit� is� set� in� the� DEVSTAT� register� as� described� in� Section� 3.1.11� ,� the� device� will� respond� to� ac-�
�celeration� data� requests� with� an� “Internal� Error� Present”� response� until� the� bits� are� cleared� in� the� DEVSTAT� register.� The� DEVINIT�
�bit� is� cleared� automatically� when� device� initialization� is� complete� (Reference� t� OP� in� Section� 2.7� ).� The� DEVRES� bit� is� cleared� on�
�a� read� of� the� DEVSTAT� register.� The� arming� function� will� not� be� updated� on� Acceleration� Data� Request� commands� if� the� DEVINIT�
�or� DEVRES� bit� is� set� in� the� DEVSTAT� register.� The� PCM� output� is� disabled� if� the� DEVINIT� or� DEVRES� bit� is� set.�
�MMA65xx�
�Sensor�
�Freescale� Semiconductor,� Inc.�
�51�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
MMA6556KW
IC ACCELEROMETER X AXIS 16QFN
MMA6826AKW
IC ACCELEROMETER XY AXIS 16QFN
MMA6854KW
IC ACCELEROMETER X AXIS 16QFN
MMA7331LR2
ACCELEROMETER 4G XYZ ENH 14-LGA
MMA8451QT
IC ACCELEROMETER 3AXIS 16QFN
MMA8452QR1
IC ACCELER 2G/4G/8G 3AXIS 16QFN
MMA8453QR1
IC ACCELER 2G/4G/8G 3AXIS 16QFN
MMBF0201NLT1
MOSFET N-CH 20V 300MA SOT-23
相关代理商/技术参数
MMA6527KWR2
功能描述:加速计 - 板上安装 XY-AXIS 120/ 120G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6555KW
功能描述:加速计 - 板上安装 X-AXIS 100G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6555KWR2
功能描述:加速计 - 板上安装 X-AXIS 100G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6556KW
功能描述:加速计 - 板上安装 X-AXIS 120G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA6556KWR2
功能描述:加速计 - 板上安装 X-AXIS 120G RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA65XX
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Dual-Axis SPI Inertial Sensor
MMA6700AEGR2
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:High Accuracy Low g Inertial Sensor MEMS Sensing, State Machine ASIC
MMA6700EG
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:High Accuracy Low g Inertial Sensor MEMS Sensing, State Machine ASIC